
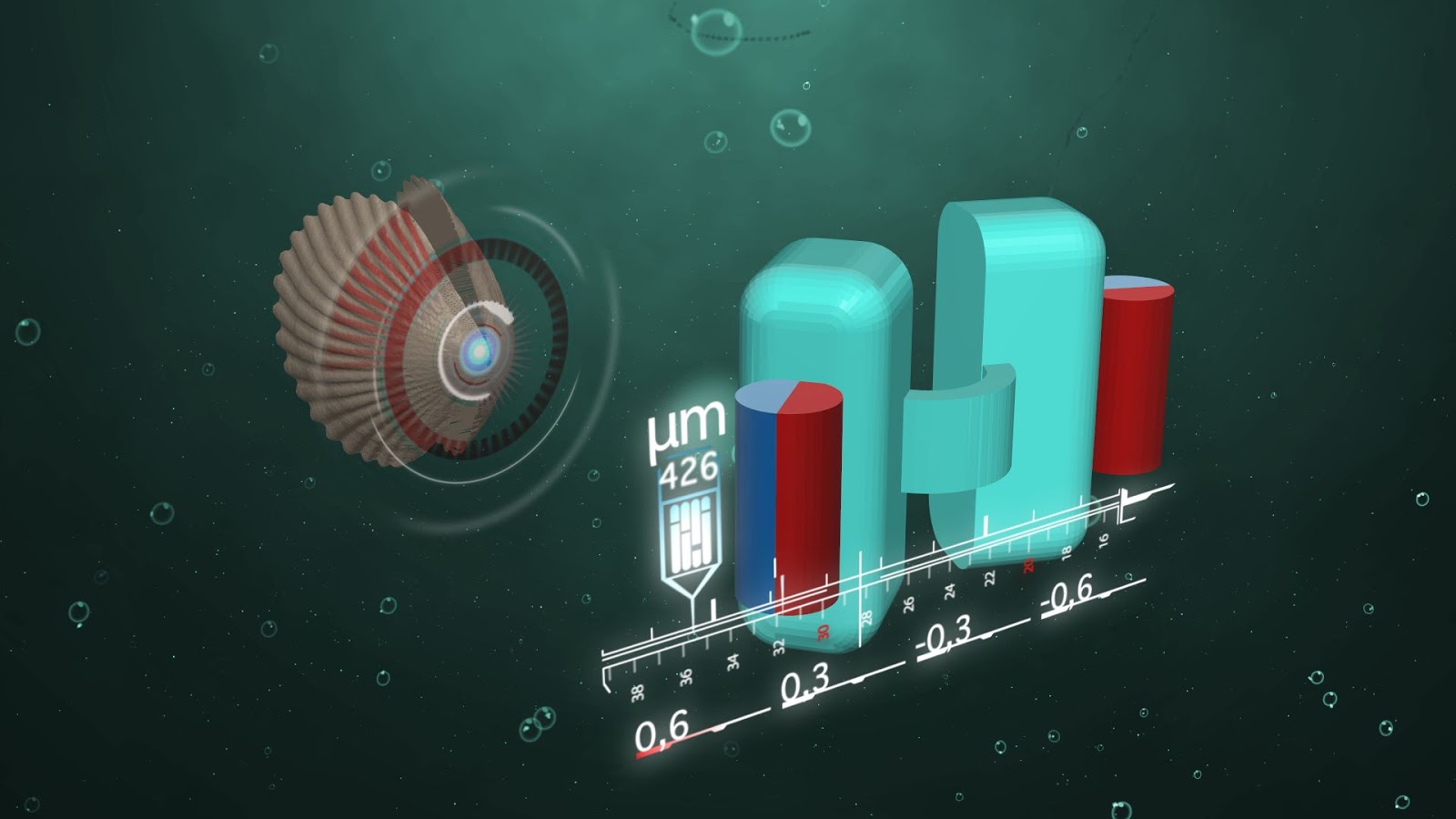
On the left, a schematic drawing of a scallop and the opening/closing motion that moves it forward. On the right, a 3D model of the sub-millimetre size ‘micro-scallop’ robot with the ‘shell’ in teal and the magnets used to activate it in red and blue (Image credit: Alejandro Posada, Max Planck Institute)
Researchers have created an artificial micro-swimmer which could swim through viscous fluids such as saliva and blood by opening and closing its shells at different rates.
The robot consists of two silicone polymer shells, each only 300 micrometres in size, connected by a single hinge. An external magnetic field is used to drive the movement of each shell by interacting with rare earth micro-magnets attached to each. The device is referred to as a “micro-scallop” for the way it imitates the sea creature’s method of swimming.
Micro-swimmers like this one could be useful in drug delivery and as diagnostic probes.
Videos are available.
Original research paper published in Nature Communications on November 4, 2014.
Names and affiliations of selected authors
